汽车前照灯远近光形调整系统设计(图)
摘要: 汽车前照灯的远近光形的好坏和照射方向对汽车夜间安全行驶起着重要的作用。GB7258对远近光形的相对照射位置及相互之间的关系有明确的规定。对于车用灯具的制造厂商来说如何将产品调整到一致就需要一个经济实用的调整设备。
一、引言
汽车前照灯主要是用于汽车夜间行驶照明。它的亮度和照射方向对于行车安全是至关重要的。夜间汽车所有前照灯同时照明时,灯具应具有能使驾驶员看清前方100米距离以内交通障碍物的性能,照明光束应对准汽车的前进方向,主光轴方向应该偏下。远近光的照射方向和相对位置有固定要求(参见GB7258技术要求)。
前照灯的发光强度不足或者照射方向不合适,汽车前方的情况就不能清晰易见,或者给迎面驶来的汽车里的驾驶员造成眩目,妨碍视野,这些都是导致事故的因素。
基于此,为了降低行车事故,确保行车安全,汽车在出厂前,其前照灯必须调整正确。采取新的高效、简便的方法代替原有的检测手段就成了我们的研究目标。本文从CCD与嵌入式平台的组合应用方面提出了新的检测前照灯的办法。
二、系统设计
目前汽车前照灯系统中明暗截止线有两类,一类是水平线与一条15°斜线组成,另一类则是由水平线与45°斜线组成,本系统针对的是前者。系统结构框图如图1所示。
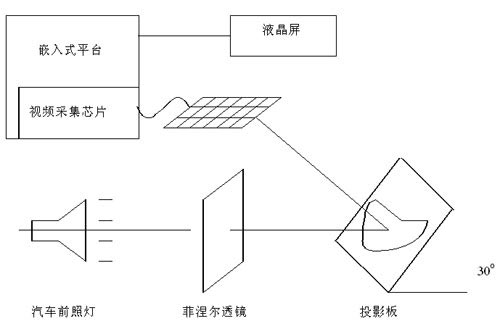
图1 系统结构图
首先将一校准好的前照灯(这里可以称为标准灯)在搭建好的测试装置上获得标准灯的图像,通过软件处理,得到标准灯的近光拐点和远光光强最大点或者最亮区域中心点的位置,并以之为标准,以后所有待测的前照灯经过软件处理所得到的边缘图形均与之比较,这样就可以得出待测车灯与标准之间的位置差异。处理结果显示在液晶屏上,并指出前照灯调整的方向,使用者根据实际需要进一步调整待测灯与标准重合。
三、嵌入式平台硬件结构
图2所示的嵌入式开发平台的硬件体系结构选择的是Samsung S3C2410微处理器,64兆字节内存和64兆字节NAND FLASH。视频采集模块选用Phi1ips公司的可编程视频输入处理芯片(VIP)SAA7111。软件采用的是Windows CE.net。
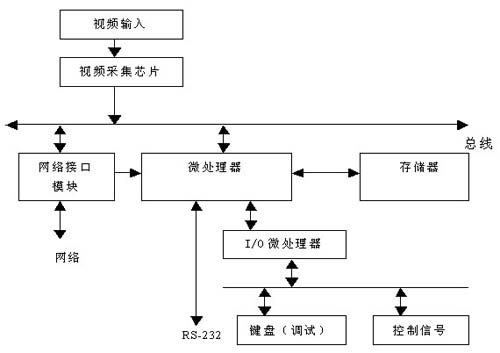
图2 嵌入式平台硬件结构框图
四、分析原理
软件采用的编程环境为基于Windows CE 的Embedded Visual C++。对于获得的近光图像求得梯度变化最大的象素点,从而将图像变换为轮廓图。采用Bresenham画线算法获得两条直线,近一步获得交点位置,即近光拐点位置。
由于近光调整好后,原则上远光不允许再进一步调整,因此在获得远光的图像后,经过处理得到远光最大值或最大值区域(一般情况下是最大值区域),获得最大值的中心点作为远光的光强中心位置,据此来判断远近光的相对位置是否符合要求。
软件还提供了找出最大值位置与描述等光强带的功能。
五、装置流程
图3所示的是系统的实验平台,图4所示的是系统的工作流程。在近光调整满足要求后系统自动点亮远光并转入远光光强最大点位置的寻找。并将处理结果显示在液晶屏上。

图3 系统试验装置
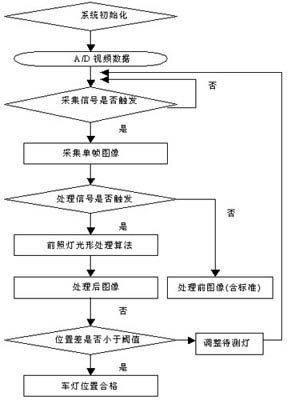
图4 系统工作流程
六、实验结果分析
图5为实际获得的近光图像,绿线为标准灯近光拐点的位置。图6为待测车灯经过处理后的图像。蓝色线为处理结果的光型拐点,并按光强等级采用不同的颜色区域来表示。
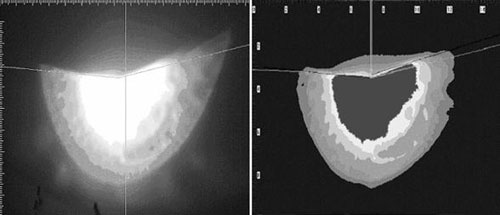
图5 待处理图像 图6 已处理图像
七、结论
从上述的实验结果中,可以看出采用CCD与嵌入式平台的组合检测汽车前照灯的系统是可行的。此种方法装置简单,操作方便,且经济实用。因此,可以认为本实验中的检测方法有其自身的优越性,市场前景也很可观。
参考文献
[1] 张军、李含善. 可编程视频信号输入处理器SAA7111[J]. 国外电子元器件, 2002 , 8:39~42.
[2] Wayne Wolf. Computers as Components: Principles of Embedded Computing System Design[M]. Morgran Kaufmann, 2001: 114~150.
凡注明为其它来源的信息,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点及对其真实性负责。
用户名: 密码:







